Ich horte seit Jahren eine Scheibe Plexiglas, um ein Set aus diesen geometrischen Formen daraus zu lasern. Warum? Wenn ich mir schon die Arbeit mache, dann doch aus Glas, oder verschiedenem Holz (Olive, Pistazie, ich erzählte Joseph Mauritius aus hinter Marmelete davon!), oder echter Keramik, was man als Workshop machen kann.
Moderne Keramik, als Miniatur Puzzle Sets, oder in echt als Kacheln beim Fachhändler oder am Besten: Mit verschiedenen blausand-Designs zum Auswählen im eigenen Online-Shop.
Es führt kein Weg dran vorbei, diese Kunst in Persien zu studieren, selbst wenn man nur auf mathematischer Ebene davon fasziniert ist.
Wir können nicht wissen, ob die Spiritualität nur ein billiger Ersatz für Wissenschaft ist, oder Wissenschaft nur ein billiger Ersatz für Spiritualität, aber solange das der Unique Selling Point der Spiritualität ist, bleib ich bei der Wissenschaft.
In einer Pop-Up-Ausstellung im Deutzer Hafen wird das Projekt AURORA erstmals in Köln zu sehen sein! In einer Zusammenarbeit von Quartier am Hafen und Sous Sol öffnet das ehemalige Lager des Hänneschen Theaters vom 10.-12. Oktober 2025 die Pforten, um 30 Positionen zeitgenössischer Kunst zu zeigen.
Der Prototyp des Heliostatenfeldes wird an die Westfassade montiert und in Betrieb genommen, um die Abendsonne auf den Vorplatz zu spiegeln und nach Einbruch der Dämmerung sein besonderes Lichtspiel zum Besten geben.
Zur Eröffnung am 10.10. um 19:00 Uhr möchten wir euch herzlich einladen.
Es ist verschiedentlich noch nicht bekannt, dass mensch auf jeder Website ein Bookmarklet namens „PressThis!“ aufrufen kann, dass vermittels JavaScript den Titel und die Adresse in ein WordPress-post-popup setzt, sodass man nur noch auf „Veröffentlichen“ klicken muss.
Natürlich kann man vorher den Post kommentieren, bearbeiten, kategorisieren, etc.
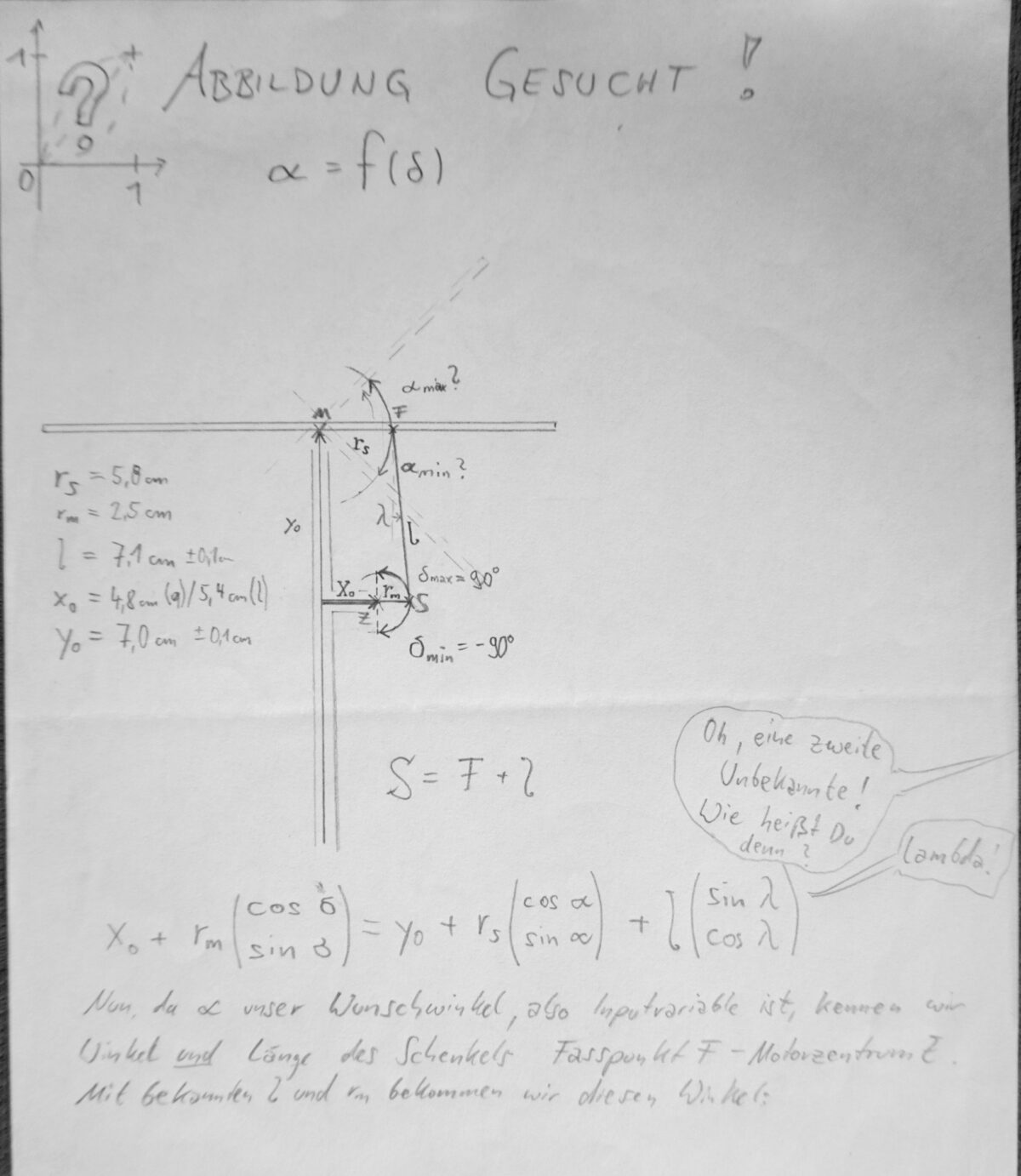
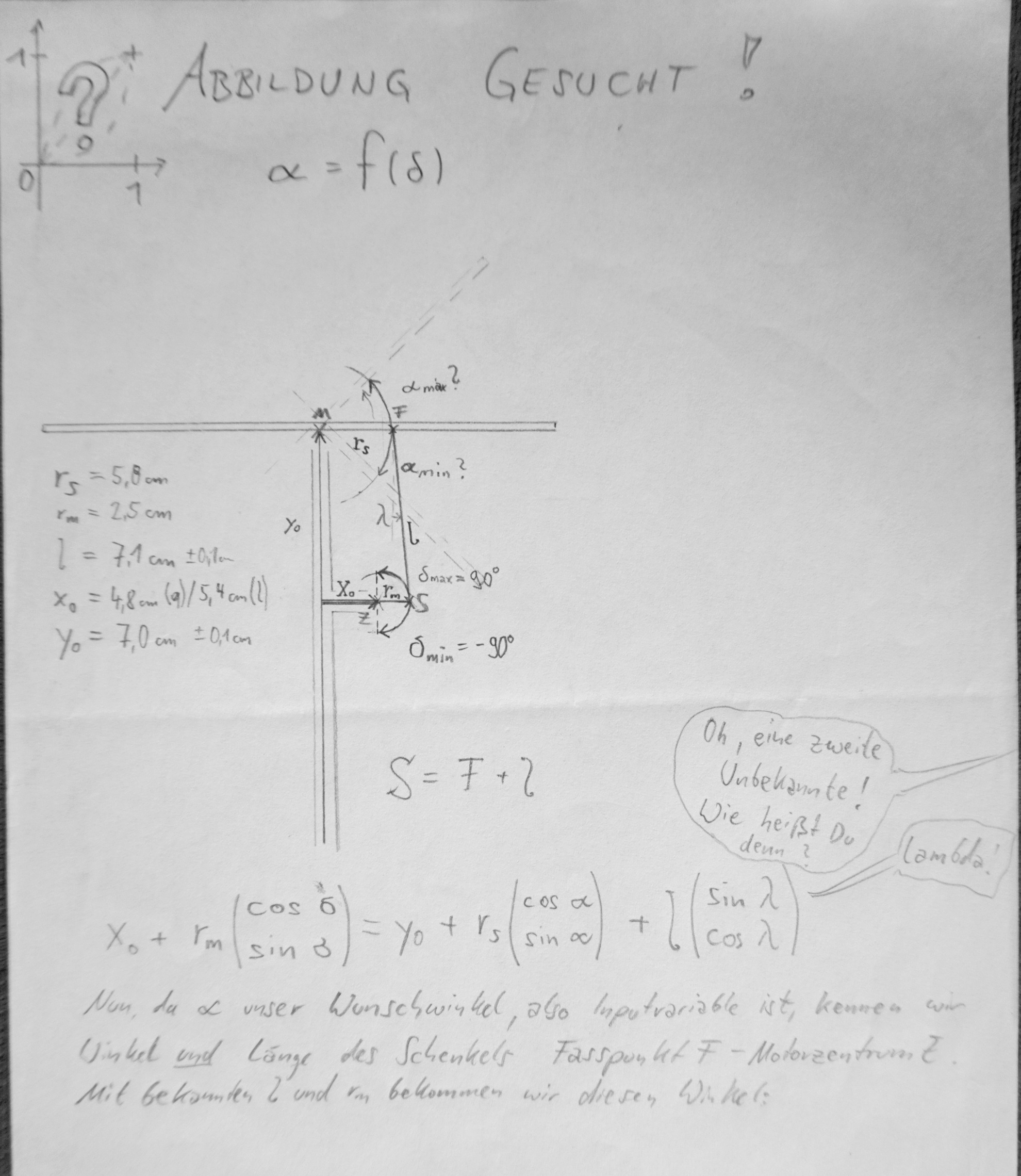
Die Spiegelelemente der Skulptur AURORA werden von Servomotoren bewegt, die 180° Bewegungsfreiheit haben. Die Arme an den Motoren sind aber nur 53mm lang, die Aufnahme an den Spiegeln ist dagegen 80mm vom Angelpunkt entfernt. Während die Motoren also ±90° drehen, neigen sie den Spiegel dabei nur etwa um ±45° je Achse. Bis jetzt wurden die Kalibrationspunkte einfach linear interpoliert, obwohl mit dieser Geometrie keine lineare Abbildung erfolgt.
Die erste Zeichnung der Geometrie zeigt die Stellung an den Endpunkten, vergisst aber, dass damit der Kolben in Mittelposition nicht orthogonal steht. Inzwischen haben wir andere Maße, längere Motorhörner und andere Gelenke, woraus sich eine größere Winkelspanne ergibt und damit wird die Präzision kritischer.
Formel gesucht
Schon vor einigen Jahren hatte ich das Problem einmal skizziert und eine erste Formel dazu.
Die erste Skizze des Problems nennt den Punkt auf demSpiegel noch F. Der Winkel lambda spielt auch in der folgenden Lösung keine Rolle. Die Vektoren X0 und Y0 heißen im Folgenden Ms und Mm, aus sigma wurde rho.
Erst jetzt bin ich dazu gekommen, diese endlich einmal nach dem gesuchten Motorwinkel aufzulösen und in Python korrekt zu plotten.
# Define the variables and function
Ms = glm.vec2(0,12.0) # Centers of the rotations.
Mm = glm.vec2(4.5,0) # Its German, so [m]otor and [s]piegel:
rm = 5.3 # Radius of circle m
rs = 8.0 # Radius of circle s
L = 12.0 # length of crank
# Calculation of alpha as a function of rho
def rho_from_alpha(alpha_deg, _L):
alpha = np.deg2rad(alpha_deg)
# coordinates of S on the mirror
Sx = Ms.x + rs * np.cos(alpha)
Sy = Ms.y + rs * np.sin(alpha)
# angle of the line Mm-S:
MmSx = Sx-Mm.x
MmSy = Sy-Mm.y
rho1 = np.arctan2(MmSx,MmSy)
# distance between motor axis and S on mirror
MmSls = MmSx**2+MmSy**2
MmSl = np.sqrt(MmSls)
# second component of the angle between vertical and crank
try:
rho2 = np.arccos((rm**2 + MmSls - _L**2) / (2*rm*MmSl))
except:
rho2 = np.nan
rho = np.pi/2 - rho1 - rho2
return rho
Witzigerweise bin ich auf der Suche nach besserer Formatierung der Gitterlinien in Matplotlib auf eine Seite gestoßen, die genau diese Aufgabe löst und auch noch den englischen Namen dafür benennt: Crank and Rocker Motion.
Da meine Implementation den genauen Punkt, wo das Motorhorn (Rocker) zu stehen kommt, nicht zeichnet, entfällt eine Berechnung, und dieser Punkt kann m.E. auch mit einem atan-Ausdruck weniger berechnet werden.
Jedenfalls steht aktuell aus,
die Animation in der oben verlinkten Lösung in meiner Ausgabe als subplot zu sehen,
diese beiden zu animieren und
im Idealfall einige Parameter interaktiv zu machen.
Erkenntnisse über den Fußweg
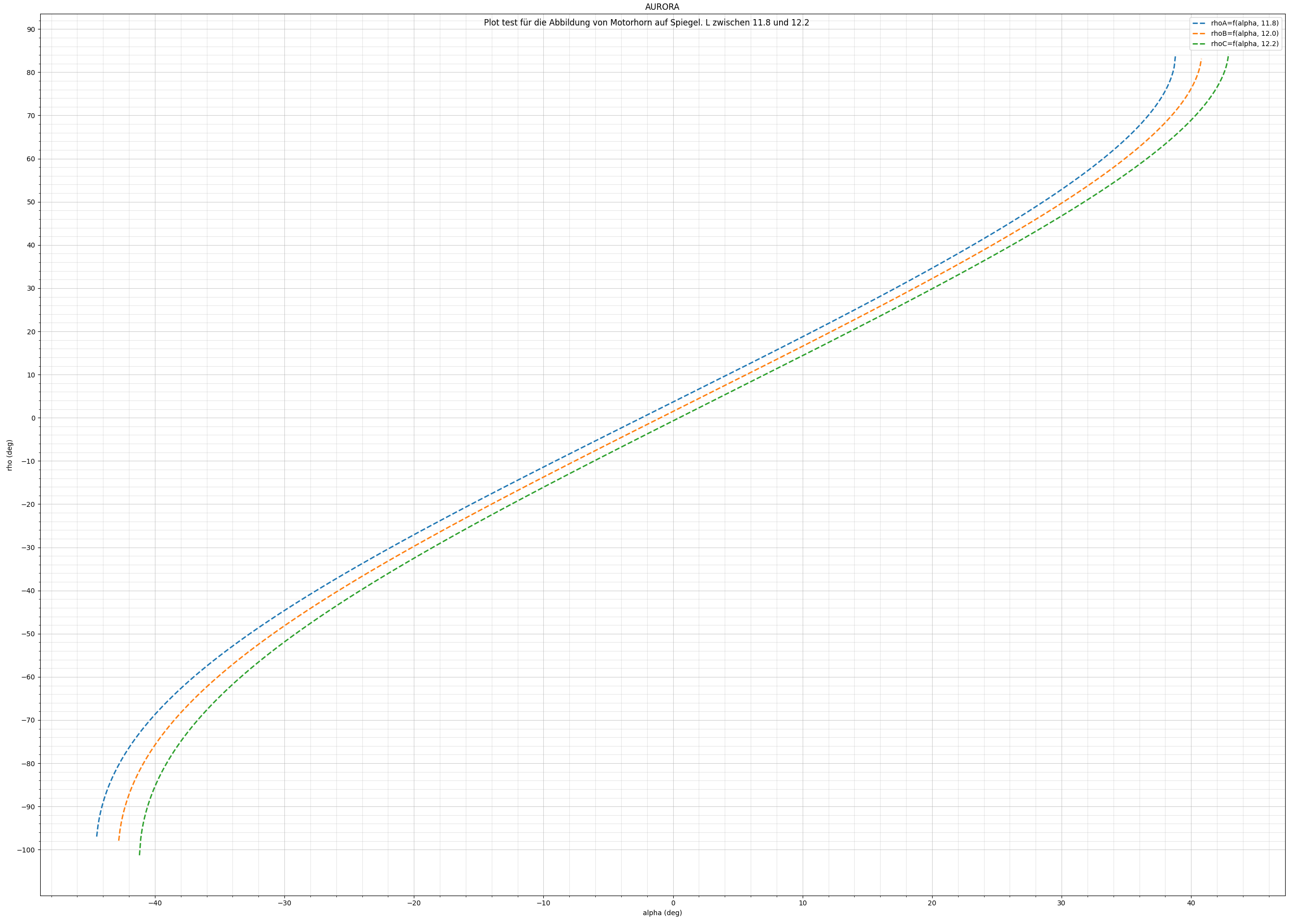
Ich habe also zunächst einmal sehen wollen, wie sehr und wohin sich die Kurve bewegt, wenn z.B Unregelmäßigkeiten in der Länge des Kolbens (Crank) auftreten. Und siehe da: Bei Abweichung um 2mm sieht man sofort, dass es ein Problem mit der Mittelstellung gibt, dass man entweder durch physische Korrektur oder durch weitere Geometriedaten per Motor lösen kann.
Drei Variationen der Kolbenlänge. Man sieht: · während der Motor beim Einziehen unter -90° noch wirkt, ist beim Ausfahren bei 87° das Maximum erreicht. Geometrisch schlüssig. · nur bei Kolbenlänge 12.2mm entspricht die Mittelposition des Motors auch der des Spiegels · die Abbildung ist selbst zwischen ±30° nicht ausreichend linear, · kann aber mit den richtigen Parametern über eine einfache Arkussinus-funktion super angenähert werden
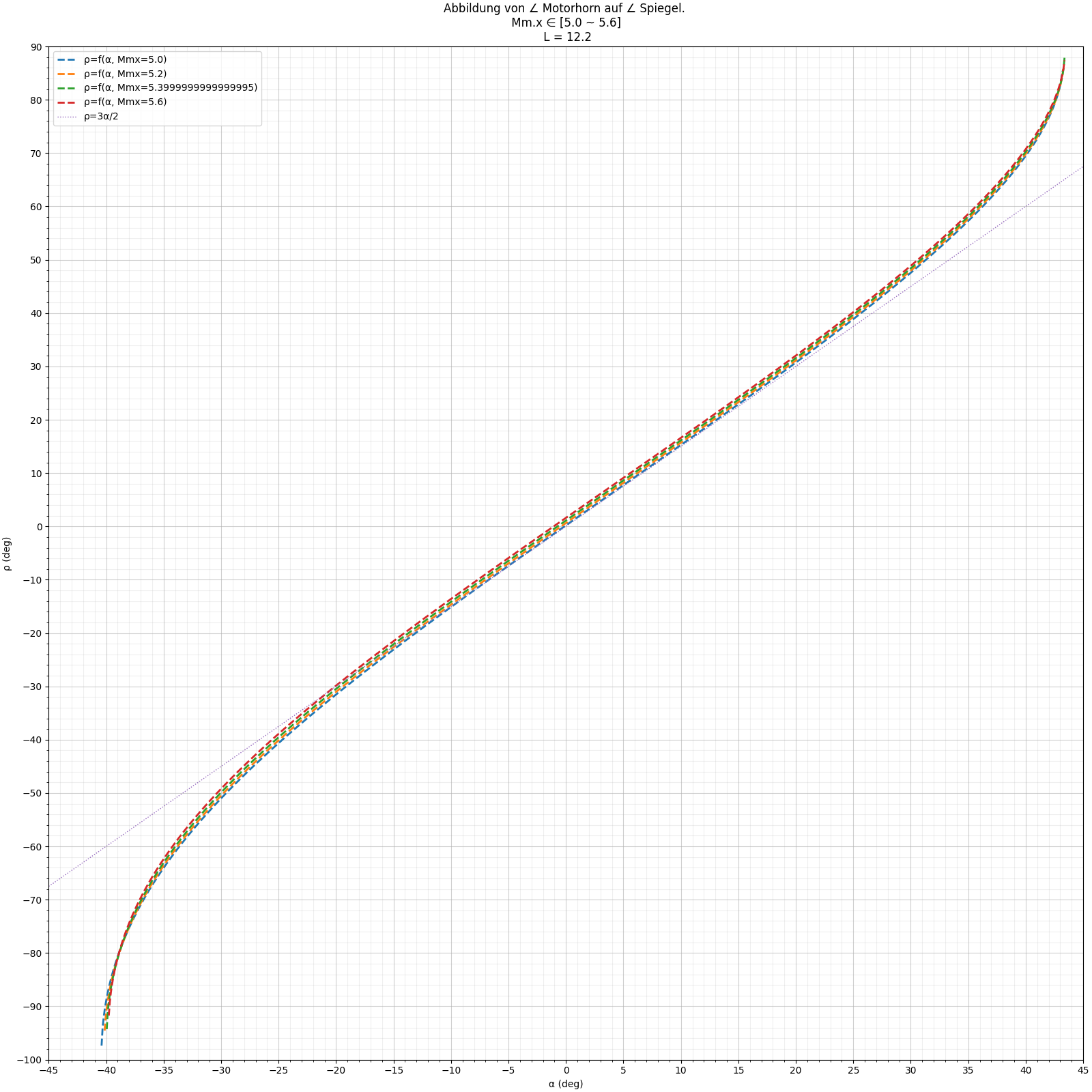
Dazu interessiert mich nun, ob als physische Korrektur eine Verschiebung der Käfige mit je zwei Motoren die Abbildung wesentlich beeinflusst.
Die Kurven für verschiedene Abstände des Motors von der Befestigung zeigen: Abweichungen um ±2mm sind praktisch vernachlässigbar.
An dieser Stelle wird wurde es sinnvoll, die Variationen in dem Skript komfortabler zu handhaben, nämlich indem man die Kurvenschar in Schleifen errechnet und zeichnet statt jetzt dreimal manuell.
Approximation
Vermittels der Plots konnte ich wie angekündigt eine Annäherung vornehmen. Sie beinhaltet in ihrer linearen Komponente die Geometrie und ist für große positive Winkel nicht ideal:
Die Kurven für verschiedene Abstände jetzt in dünnen Linien, dafür die Annäherung gestrichelt. Formel in der Legende: ρ=1.05*arcsin(1.37*(α-2°))+3°
Insgesamt haben die Simulationen dieser Abbildung mittels Matplotlib ergeben:
Die Käfige sollten so am Rahmen eingestellt werden, dass die Spiegel bei orthogonalem Motorhorn ebenfalls plan stehen. Das ist bei L-2mm der Fall. Alle anderen Abweichungen sind vernachlässigbar.
Davon unberührt sind natürlich Abweichungen, die sich durch Kombination der beiden Auslenkungen ergeben. Ich erwarte einen leichten Kisseneffekt. Darüberhinaus wird es schwierigere Fehlabbildungen geben durch Schwerkraft, von der insbesondere die vier seitlichen Dreiecke betroffen sind.
Bei neuerlichem Nachdenken wurde mir klar, dass die zuletzt genannten Abweichungen bei Kombination in 2D große Probleme darstellen. Wahrscheinlich muss eine völlig neue Formel für die Spiegelebene aus den drei Eckpunkten gefunden werden, denn die Achse der Drehung ändert sich ja beim Auslenken mit dem anderen Motor. In der Praxis sieht das ganz einfach und funktionierend aus, aber geometrtisch sind es mitnichten unabhängige Achsen zur Auslenkung in x bzw. y.
Ok, wir haben Ende 2023. Aber immernoch gibt es manchmal Situationen, wo ich weder mit Code noch mit Pseudocode was gut erklären kann. Dann hilft mir oft ein Relikt aus meiner Kindheit namens GFA-Basic. Der Interpreter kümmert sich um die Einrückung und Colorierung während ich tippe. Es gibt kaum Klammern und keine Semicola. Menschen können das fast vom Blatt lesen, und darum geht es.
Ihr kennt sicher alle diese schönen Kurven, die galant durch eine Reihe von Kontrollpunkten laufen? Nun, gestern hab ich versucht, Emilio zu erklären, wie solche Bezierkurven entstehen:
Durch Interpolation zwischen Punkten, die ihrerseits Interpolationen sind. Vielleicht erkläre ich später noch ein paar Fallstricke zu Anzahl und Reihenfolge dieser Punkte, aber für heute nehmen wir die einfachste Form: Jeder Ankerpunkt, durch den die Kurve läuft, hat zwei spiegelbildliche Kontrollpunkte, durch feine Nadeln zu ihrem Ankerpunkt dargestellt. Deswegen brauchen wir nur einen davon abzuspeichern, der andere leitet sich davon ab.
Der Trick ist nun, dass man die Kurve in Abschnitten zwischen je zwei Ankerpunkten zeichnet. Den ersten Ankerpunkt wird die Kurve in Richtung ausgehender Kontrollpunkt verlassen, den zweiten Ankerpunkt in Richtung eingehender Kontrollpunkt erreichen. Dazu lässt man einen Parameter von 0 nach eins wandern und nutzt ihn insgesamt sechs mal zur Interpolation zwischen je zwei Punkten:
Zunächst errechnet man drei Zwischenpunkte aus vieren, aus denen sich wiederum zwei Zwischenpunkte ergeben, und zwischen diesen liegt der eine gesuchte Punkt, der die eigentliche Kurve zeichnet.
Hier ist der GFA-Basic-Code, um einige zufällige Punkte zu erzeugen und dann eine Bezierkurve durch sie zu zeichnen:
' *** Für Emilio mal eben BezierKurven visualisiert
' *** Remember: We have to calculate 3 levels of interpolation in order to
' *** get those curves going through control points continuously
' ** INITIALISIERUNG
Type Int2 :
x As Short
y As Short
EndType
Local Short maxSegment = 18
Local Short maxContRange = 512
Local Short maxSteps = 120
Global Tang(maxSegment) As Int2
Global Cont(maxSegment) As Int2
Global ext, p As Int2
AutoRedraw = True
OpenW 1, , , 1600, 1280, 0
Global res As Int2 : res.x = _X : res.y = _Y
randomPoints(maxSegment, maxContRange)
DrawBezier(maxSegment, maxSteps)
'Warteschleife
Repeat
DoEvents
Until ext Or InKey$ = #27
CloseW 1
Sub randomPoints(maxSegment&, maxContRange&)
' Generate and draw points
Local T As Int2, C As Int2, segment
For segment = 0 To maxSegment - 1
' tangent points
T.x = Rand(res.x * .8) + res.x * .1
T.y = Rand(res.y * .8) + res.y * .1
Color RGB(128, 128, 128)
Box T.x - 2, T.y - 2, T.x + 3, T.y + 3
' write to array
Tang(segment).x = T.x
Tang(segment).y = T.y
' control points
C.x = Rand(maxContRange) - maxContRange / 2
C.y = Rand(maxContRange) - maxContRange / 2
Color RGB(64, 192, 128)
Box T.x + C.x - 1, T.y + C.y - 1, T.x + C.x + 1, T.y + C.y + 1
Color RGB(128, 144, 255)
Box T.x - C.x - 1, T.y - C.y - 1, T.x - C.x + 1, T.y - C.y + 1
Cont(segment).x = C.x
Cont(segment).y = C.y
Next
Return
Sub DrawBezier(maxSegment&, maxSteps&)
Local Int segment, step, j
Local Float s
Local T0 As Int2, T1 As Int2, C0 As Int2, C1 As Int2
Local R As Int2, G As Int2, B As Int2
Local GR As Int2, RB As Int2
Local Z As Int2, old As Int2
For j = 0 To maxSegment - 1
T0 = Tang(j)
C0 = Cont(j)
' make control point absolute:
C0.x += T0.x : C0.y += T0.y
T1 = Tang((j + 1) % maxSegment)
C1 = Cont((j + 1) % maxSegment)
' mirror control point 1 and make absolute:
C1.x = T1.x - C1.x : C1.y = T1.y - C1.y
For step = 0 To maxSteps
s = step / maxSteps
' Interpolation Level 1:
' grüne Punkte = Tangentialpunkt 0 bis Kontrollpunkt 0
interpol(T0, C0, s, G)
Color RGB(64, 192, 128)
Pset G.x, G.y
' blaue Punkte = Spiegelung von Kontrollpunkt 1 bis Tangentialpunkt 1
interpol(C1, T1, s, B)
Color RGB(128, 144, 255)
Pset B.x, B.y
' rote Punkte = Interpolation zwischen Kontrollpunkten
interpol(C0, C1, s, R)
Color RGB(255, 192, 184)
Pset R.x, R.y
' Interpolation Level 2:
' grün-rote Interpolation
interpol(G, R, s, GR)
' rot-blaue Interpolation
interpol(R, B, s, RB)
' Interpolation Level 3:
' schwarZe Punkte = BeZierkurve
old = Z
interpol(GR, RB, s, Z) ' in Z wird das Ergebnis geschrieben
If step > 0
Color RGB(0, 0, 0)
Line old.x, old.y, Z.x, Z.y
EndIf
Next
Next
Return
Sub interpol(ByRef start As Int2, ByRef end As Int2, s, ByRef p As Int2)
p.x = start.x * (1 - s) + end.x * s
p.y = start.y * (1 - s) + end.y * s
Return
Sub Win_1_MouseWheel(Buttons&, Delta%, MseX%, MseY%)
ext = Buttons && 1
Return
Sub Win_1_ReSize
res.x = _X : res.y = _Y
Win_1.BorderStyle = 0
Return
Geschlossene Bezierkurve mit 18 zufälligen Ankerpunkten, gezeichnet mit GFA-Basic
habe ich nochmals gecheckt, wie praktikabel es wirklich ist, Telegram in seriös zu nutzen, also nicht völlig unverschlüsselt.
Also. Die für modernes instant messaging essentielle Ende-zu-Ende-Verschlüsselung ist in Telegram
a) optional b) umständlich zu finden c) muss sie für jeden Kontakt einzeln angeschaltet werden und d) nicht aus dem Kontakt selbst aufrufbar, also nicht für die zentrale Funktion unserer Mobilgeräte, das „Teilen“, verfügbar.
Seit einigen Tagen schmücken neue Flaggen unser Quartier.
Die Hausgemeinschaft hat sich in einer Ausschreibung für meinen Entwurf entschieden, den ich mithilfe von #vvvv gerendert habe. Direkt aus demselben patch hatte ich dann auch die Druckvorlagen erstellt.
Was mag das bedeuten, dass ich so gar nichts über das I Ging erinnere? Hatte ich dieses Kulturgut wegen bool isEsoteric = true nach /dev/null gepiped?
Jetzt bin ich jedenfalls zum ersten Mal über die binäre Codierung seiner 64 Zeichen, genannt Hexagramme, darauf gekommen. Diese sind allerdings keine digitale Früherscheinung in der Geschichte der Zahlenschrift, wie Leibniz nach seiner Erfindung des Binärcodes irrtümlicherweise annahm. Skeptisch eingeordnet sind sie schon eher ein Zeichensatz für eine altertümliche Methode zur Erforschung des Unbewussten, wie C.G. Jung sie aufgefasst hat.
Darüber hinaus aber vor allem eine unwahrscheinlich passende ästhetische Inspiration während meiner aktuellen Arbeit mit geometrischen Generatoren. Kein Wunder, dass mir am Tollsten daran gefällt, dass sowohl die Trigramme als auch die Hexagramme im UTF-Zeichensatz standardisiert sind.
Zum Nachtisch gönne ich mir aber auch ein kleines Bedeutungszitat, gewissermaßen als Orakelersatz:
Sprüche auf Hintergrundbildern. Wie sich mir beim scrollen die Nackenhaare aufstellen. Nicht, weil sie seicht und orthografisch kaputt sind und/oder die grafische Gestaltung an ihren Vorgänger, den esoterischen Wandkalender erinnert. Nein: Es regt sich eine Facette des Utopisten in mir, der die Information frei fließen sehen will, der das Semantic Web feiert, unter schlechten OCR-Werkzeugen gelitten hat oder einfach nur was markieren, kopieren und einfügen will, wo nunmal kein Bild eingefügt werden kann.





{kind=link}